DD马达专题
发布时间:2018-06-02
阅读次数:143
文章来源:博智达
导读:
一、DD马达的介绍:1.DD马达(“DD”是Driect Drive直接驱动的简称)DD马达由于其输出力矩大,因此有些公司将该产品直接称为力矩伺服。2.与传统的马达不同,该产品的大力矩使其可以
一、
DD马达的介绍:
1.DD马达(“DD”是Driect Drive直接驱动的简称)DD马达由于其输出力矩大,因此有些公司将该产品直接称为力矩伺服。
2.与传统的马达不同,该产品的大力矩使其可以直接与运动装置连接,从而省去了诸如减速剂,齿轮箱,皮带等等连接机构,因此才会称其为直接驱动马达。
3.由于一般该型马达都配置了高解析度的编码器,因此使该产品可以达到比普通伺服高一个等级的精度。
4.又由于采用直接连接方式,减少了由于机械结构产生的定位误差,使得工艺精度得以保证。
5.另对于部分凸轮轴控制方式,一方面减少了由于机械结构摩擦而产生尺寸方面的误差,另一方面也对安装,使用时的噪音等方面降低了很多。也被称为电子式回转工作台。
二、DD马达的内部结构:
三、
DD马达相关计算及特性:
1)最大输出扭矩(Tmax)
马达的最大输出扭矩由马达电流决定
单位:NM=kgm2/sec2
最大电流:A系列:20A B系列:15A

2)额定扭矩(Tr)
马达在额定速度下的额定扭矩
Tr=Tmax*0.7
3)最大速度(Vmax)
可用的最大速度
最大速度下的扭力输出几乎为零,单位:rps (转/秒)
4)额定速度(Vr)
可使用的最大速度
5)额定输出功率(Wr)
马达在额定速度下的输出
Wr=2*Pie*Vr*Tr 单位:瓦特
6)编码器解析度
编码器(DM系列)/旋转编码器(DR系列)
马达每转一周的解析度
单位: 脉冲/周
7)定位精度
无负载情况下马达在I-PD控制下旋转一周的位置偏差
单位:角-秒(1/3600度)
8)重复定位精度
重复7次到达一个点最大差异的1/2
单位:角-秒(1/3600度)
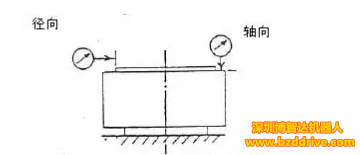
9)轴向偏差和径向偏差
马达旋转时的机械偏差
径向: 0.01mm
轴向: 0.01mm
如果需要0.01mm以下的偏差可以定制
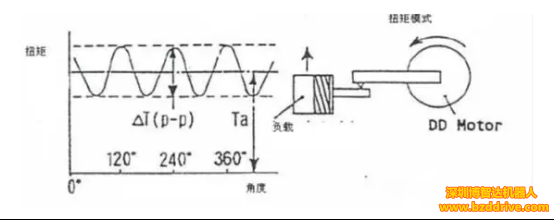
10)扭矩波动
平均最大扭矩与扭力背离的比值
<测量条件>
1. 扭矩控制模式
2. 测量每一转的扭力背离
Tr=(ΔT/Ta)*100%
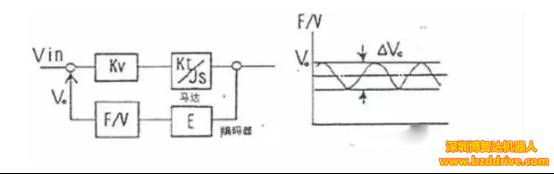
11)速度波动
平均速度反馈信号与波动速度的比值
<测量条件>
1. 速度控制模式
2. 额定速度无负载
Vr=(ΔV/Vo)*100%
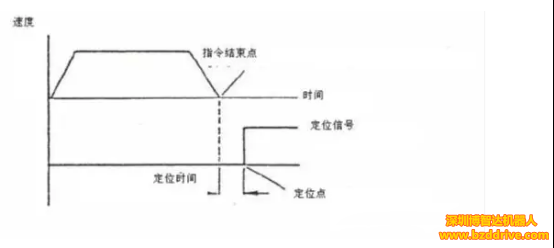
12)定位时间
指令脉冲结束后到达设定定位精度所需要时间
<测量方法>
Ti 与Tcoin的间隔
<测量条件>
1.位置控制模式(I-PD)
2.负载:转子惯量30倍
3.定位脉冲 +-一个脉冲
13)效率
额定速度与额定扭矩下 马达的输入输出比
14)轴向负荷
轴向容许最大负载,负载移开后马达可以恢复原位包括压力,张力
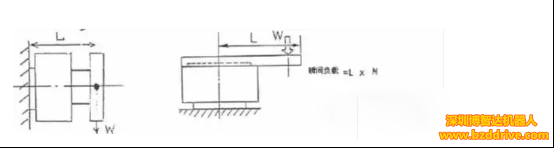
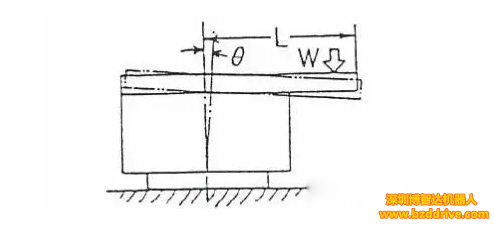
15)悬挂负载
悬挂负载如下图:负载移开后马达可以恢复原位
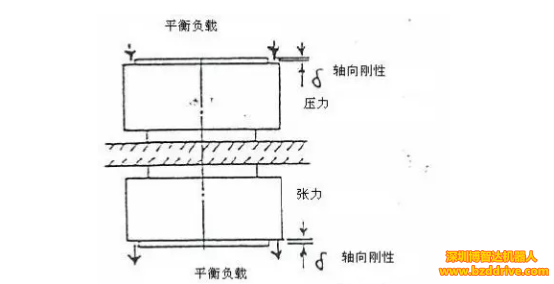
16)轴向刚性
轴向负载与轴向变形比例,成线性关系
17)径向刚性
径向负载与径向变形比例,成线性关系 θ为径向刚性